
Parametry
- 243 stránek
- 9 hodin čtení
Více o knize
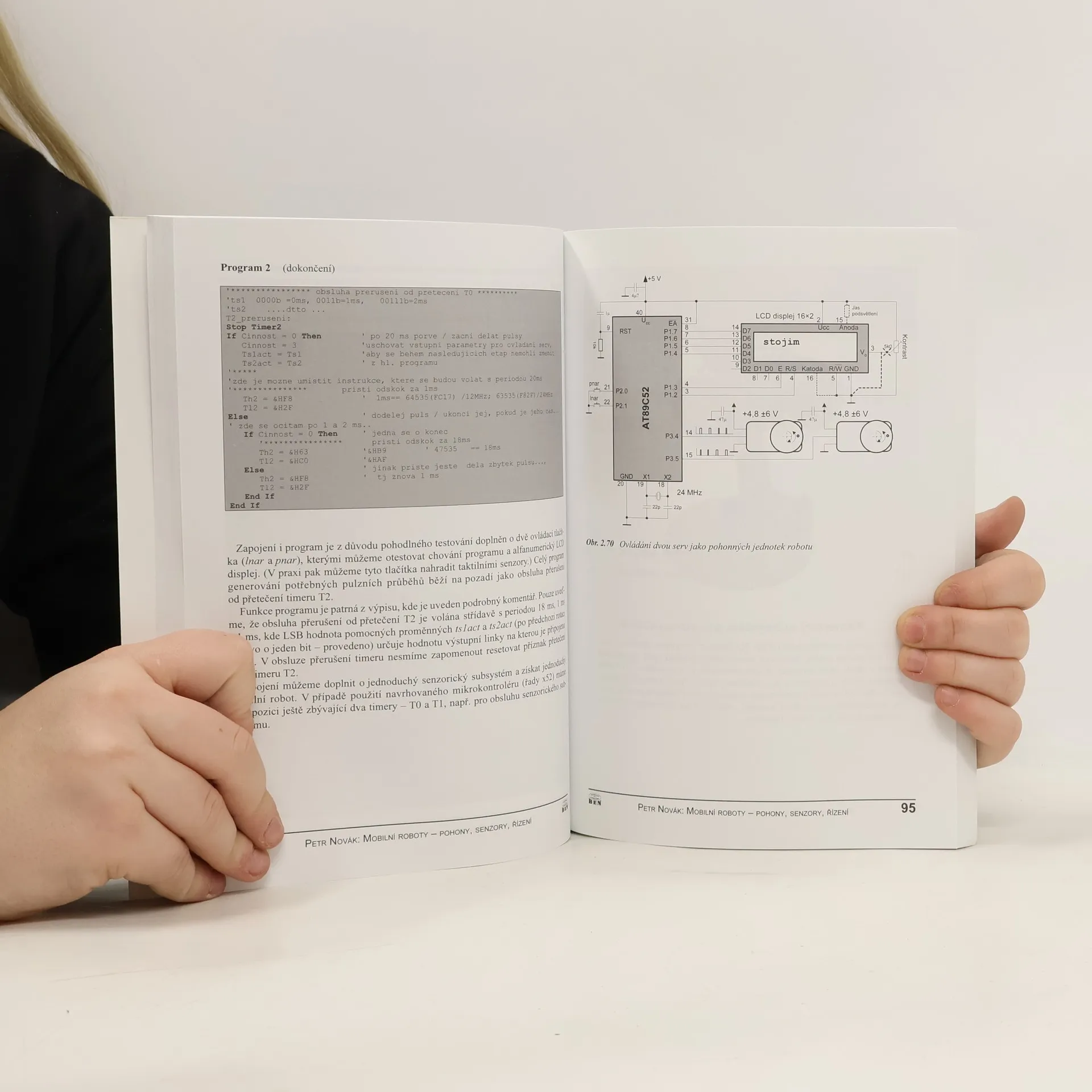
Cílem knihy je poskytnout základní informace potřebné k návrhu, sestavení a oživení mobilního robota schopného různých činností, od sledování čáry po autonomní chování. V jednotlivých kapitolách jsou probrány subsystémy mobilních robotů: podvozková část, pohonný, senzorický, komunikační, řídicí systém a řízení, s důrazem na senzorický a řídicí subsystém. Kniha se zabývá pestrou problematikou a cenné jsou autorovy zkušenosti se stavebními díly, jako je modul bezdrátové komunikace Bluetooth, ultrazvukový detektor překážek sonar SRF04/SRF08 a různé typy motorů. Řazení kapitol začíná stručným popisem řídicího systému postaveného na jednočipovém mikrokontroléru řady x51(52), který může pracovat samostatně nebo ve spolupráci s PC, což usnadňuje pozdější odkazy na vazbu subsystémů na řídicí systém. Na závěr jsou stručně popsány dva projekty mobilních robotů: tříkolového se všesměrovými koly a kráčejícího šestinohého. Subsystémy těchto robotů jsou většinou postaveny na modulech a prvcích popsaných v předchozích kapitolách, což má sloužit jako inspirace pro stavbu vlastního robota.
Nákup knihy
Mobilní roboty, Petr Novák
- Jazyk

- Rok vydání
- 2005
- product-detail.submit-box.info.binding
- (měkká)
Doručení
Platební metody
Tady nám chybí tvá recenze.
- Titul
- Mobilní roboty
- Jazyk
- česky
- Autoři
- Petr Novák
- Vydavatel
- BEN - technická literatura
- Rok vydání
- 2005
- Vazba
- měkká
- Počet stran
- 243
- ISBN10
- 8073001411
- ISBN13
- 9788073001414
- Série
- Štítky
- Naučná literatura, Technologie & Průmysl, Počítače & Internet, Technologie, Elektronika & Elektrotechnika, Věda a technika, Robotika
- Hodnocení
- 4,65 z 5
- Anotace
- Cílem knihy je poskytnout základní informace potřebné k návrhu, sestavení a oživení mobilního robota schopného různých činností, od sledování čáry po autonomní chování. V jednotlivých kapitolách jsou probrány subsystémy mobilních robotů: podvozková část, pohonný, senzorický, komunikační, řídicí systém a řízení, s důrazem na senzorický a řídicí subsystém. Kniha se zabývá pestrou problematikou a cenné jsou autorovy zkušenosti se stavebními díly, jako je modul bezdrátové komunikace Bluetooth, ultrazvukový detektor překážek sonar SRF04/SRF08 a různé typy motorů. Řazení kapitol začíná stručným popisem řídicího systému postaveného na jednočipovém mikrokontroléru řady x51(52), který může pracovat samostatně nebo ve spolupráci s PC, což usnadňuje pozdější odkazy na vazbu subsystémů na řídicí systém. Na závěr jsou stručně popsány dva projekty mobilních robotů: tříkolového se všesměrovými koly a kráčejícího šestinohého. Subsystémy těchto robotů jsou většinou postaveny na modulech a prvcích popsaných v předchozích kapitolách, což má sloužit jako inspirace pro stavbu vlastního robota.